Research in UCY Robotics Lab is both theoretical and experimental and spans many applications of robotics. Simulations are employed as a bridge between theory and experiments. Modern robotics research is multidisciplinary and this element makes it particularly interesting but also challenging. Below are briefly mentioned some indicative research works of the lab, as well as previous projects of its members. Key collaborators are mentioned. Μore information can be found in the publications list.
Reconfigurable Mechanisms and Adaptive Architecture. Structural and control concepts were introduced allowing stepwise reconfigurations of buildings based on optimal motion control sequences. The basic structure comprises a parallel arrangement of planar n-bar linkages. Control requires one actuator on each linkage and brakes installed at the joints. Experimental setups have been developed to examine the approach. Current work focuses on real-time reconfigurations in response to environmental stimuli (e.g., wind loads, sun motion). Mechanical design aspects include the use of modular components and allowing the structure to be foldable and self-erectable.
Collaborators: Prof. M.C. Phocas, Dept. of Architecture, Univ. of Cyprus, https://ucy.ac.cy/arch/en; Prof. A. Müller, JKU Institute of Robotics, Austria, https://www.jku.at/en/institute-of-robotics/.
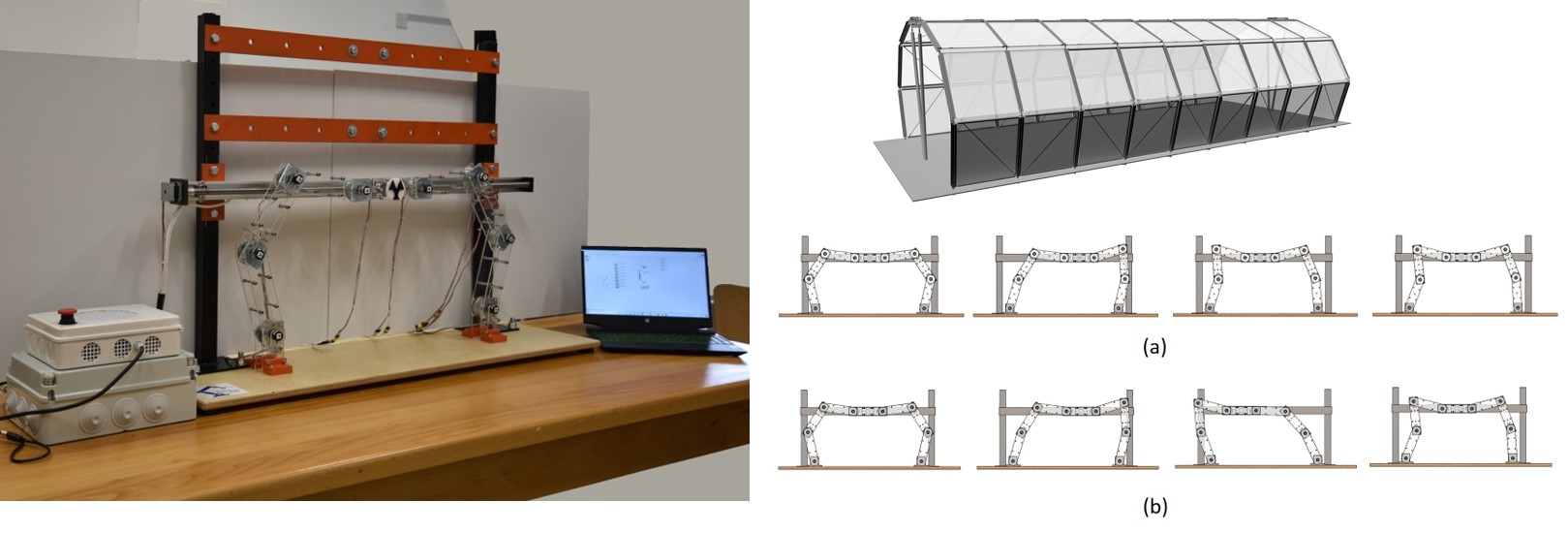
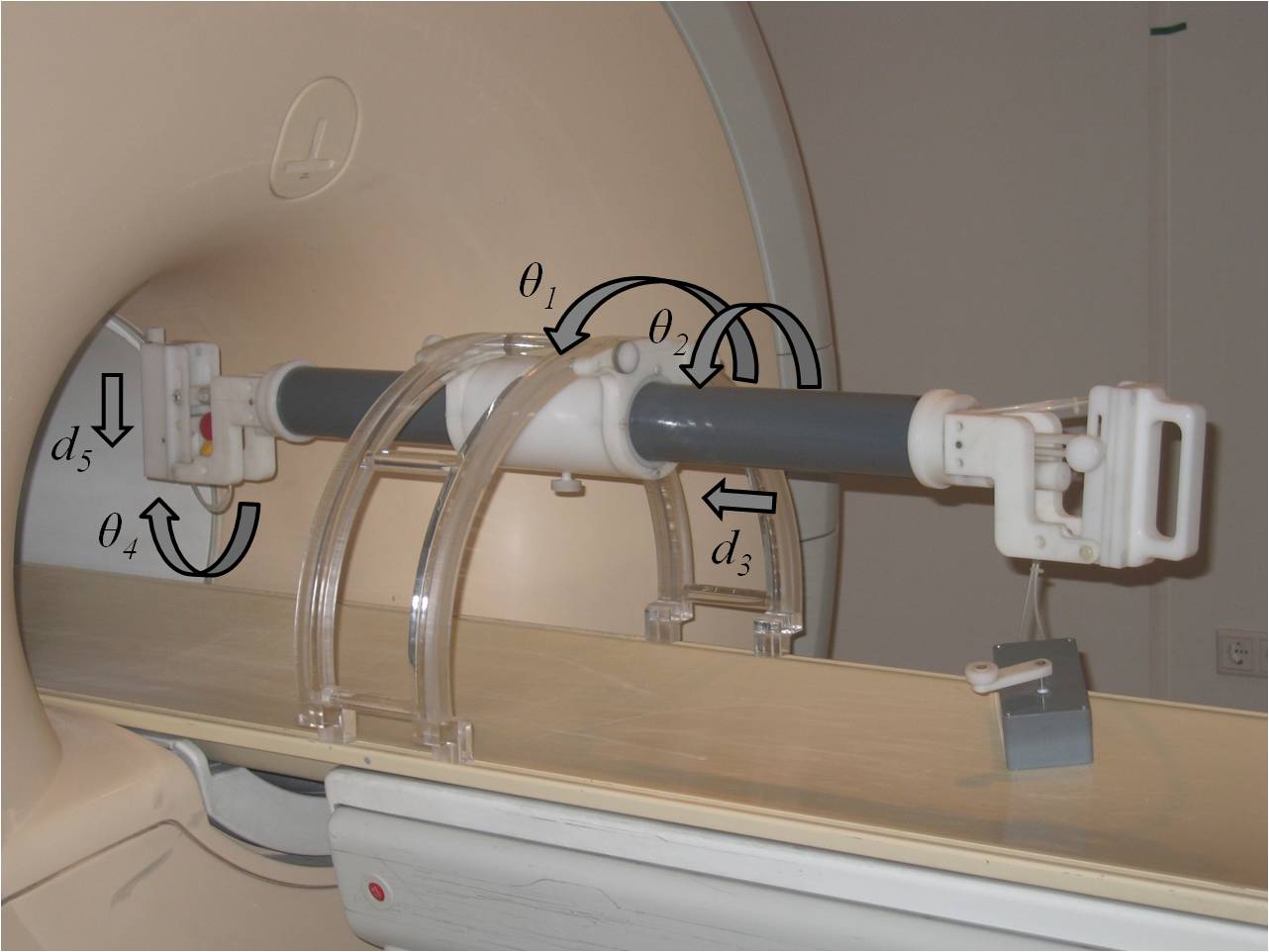
Image-guided Interventions, MRI-Compatible Robots. Medical robotics and computer-assisted interventions – Image-guided. Research focuses on robotically-assisted, image-guided minimally-invasive interventions. A prototype MRI-compatible robotic system was developed, which facilitates access to a patient inside an MRI scanner to perform diagnostic and therapeutic interventions. The real-time robot control was uniquely integrated with the scanner and extensive studies were performed. Design and control challenges are related to the strong magnetic fields and the limited accessibility to the patient inside the scanner. Work was carried out at Washington University in St. Louis, Missouri – funded by National Institutes of Health (Principal Investigator: Prof. N.V. Tsekos).
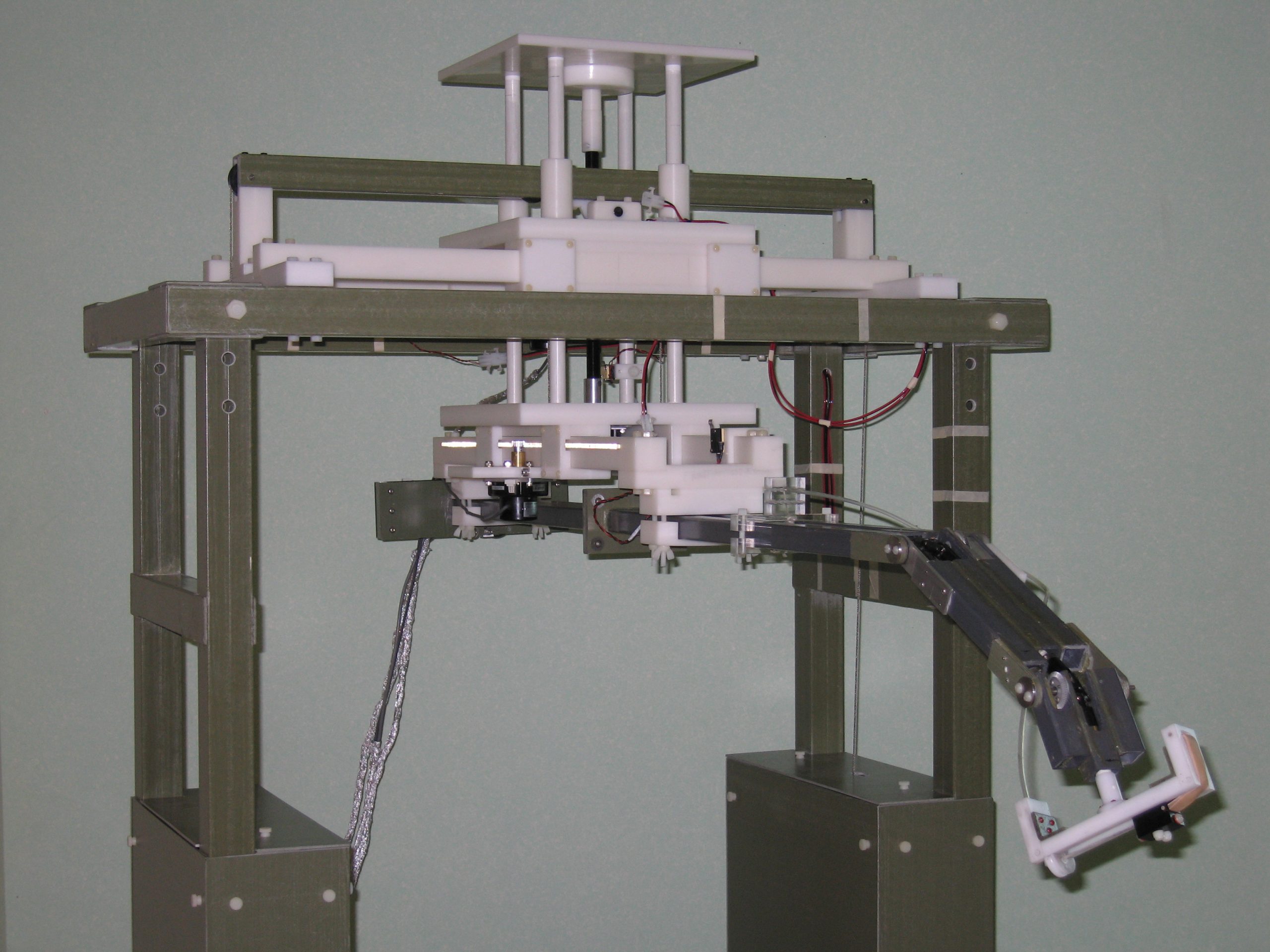
Continuation of the above work was based on a novel MRI-compatible manually-actuated manipulator for minimally-invasive interventions operated either stereotactically or under real-time image guidance. Computer-based preoperative planning tools were developed. The system was experimentally tested simulating clinical applications including image-guided biopsies and drug delivery. The project was funded by the Cyprus Research Promotion Foundation (Principal Investigator: Eftychios Christoforou - UCY).
Collaborators: Prof. N.V. Tsekos, Department of Computer Science, University of Houston, Texas, https://uh.edu/nsm/computer-science/; Prof. I. Seimenis, University of Athens, School of Medicine, Athens, Greece, https://mpl.med.uoa.gr/.

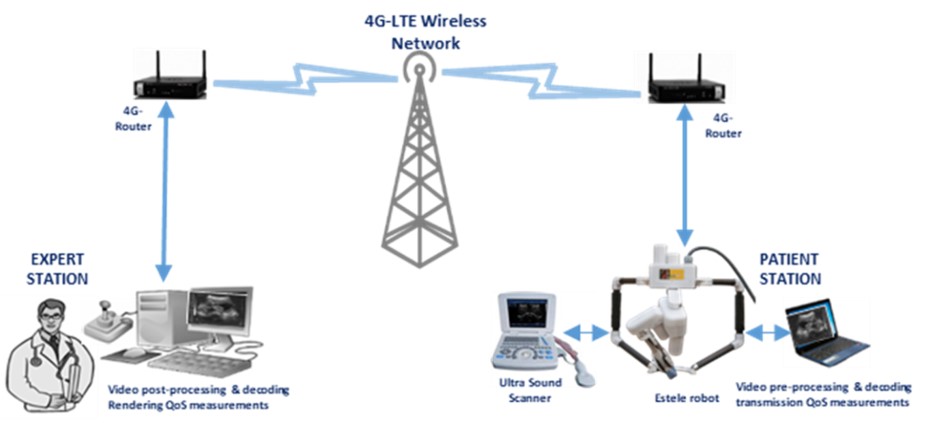
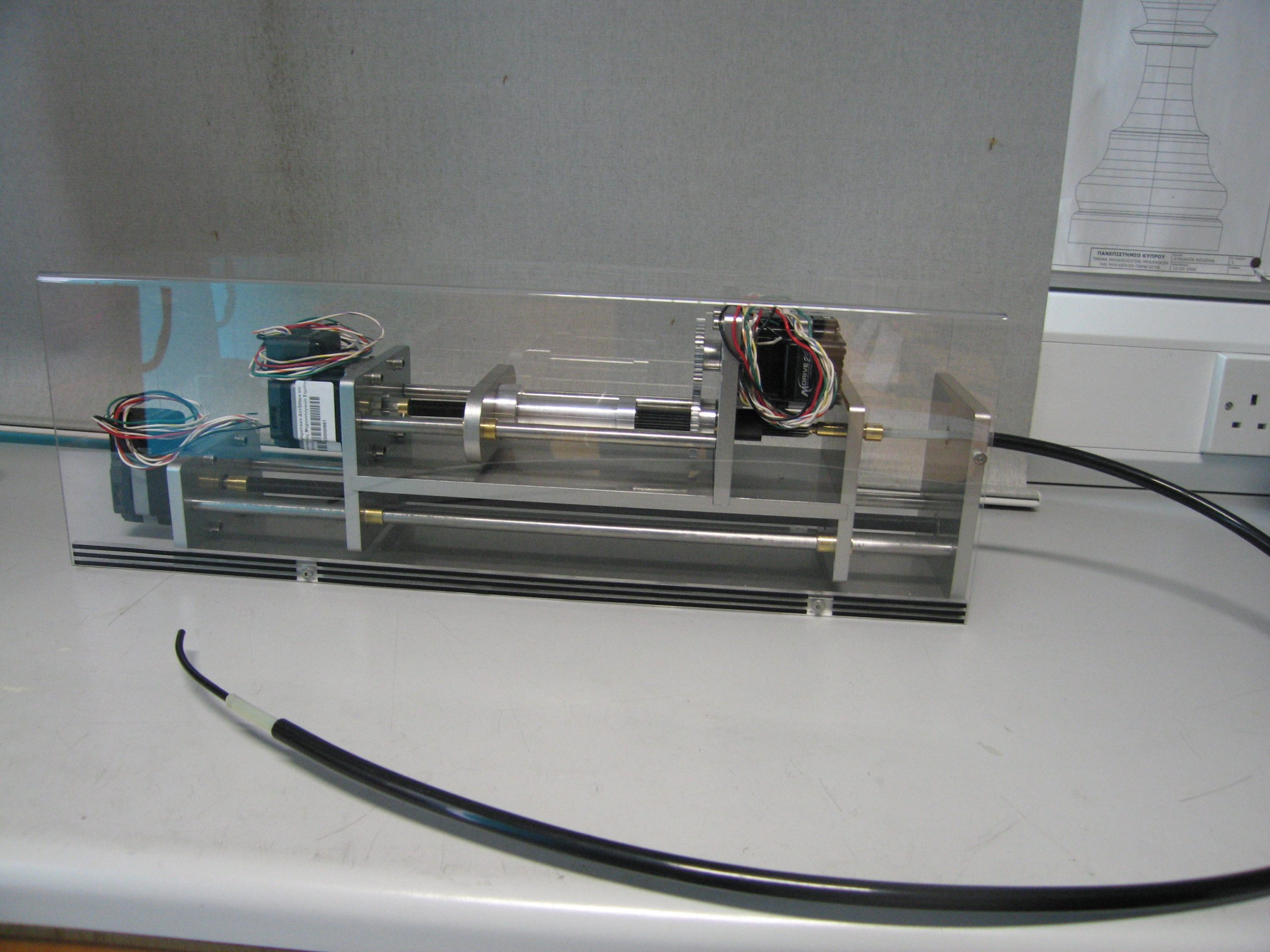
Telerobotic systems and Telemedicine. Ongoing research in telerobotics focuses on ultrasound diagnosis. Experimental work concerns a platform with a portable robot operated remotely in a master-slave mode. While the medical expert moves a fictive ultrasound probe the robot replicates this motion to perform an examination. Considered issues include mechanism design, vision/ video systems, telecommunications, control and telepresence.
Collaborators: Assist. Prof. Sotiris Avgousti, Nursing Dept., Cyprus Univ. of Technology, https://www.cut.ac.cy/faculties/hsc/nur/; Dr. A. Panayides and Prof. C. Pattichis, Univ. of Cyprus Dept. of Computer Science, http://www.ehealthlab.cs.ucy.ac.cy/; Prof. P. Vieyres Université d'Orléans, France, https://www.univ-orleans.fr/fr/iut-bourges
-

- OLYMPUS DIGITAL CAMERA
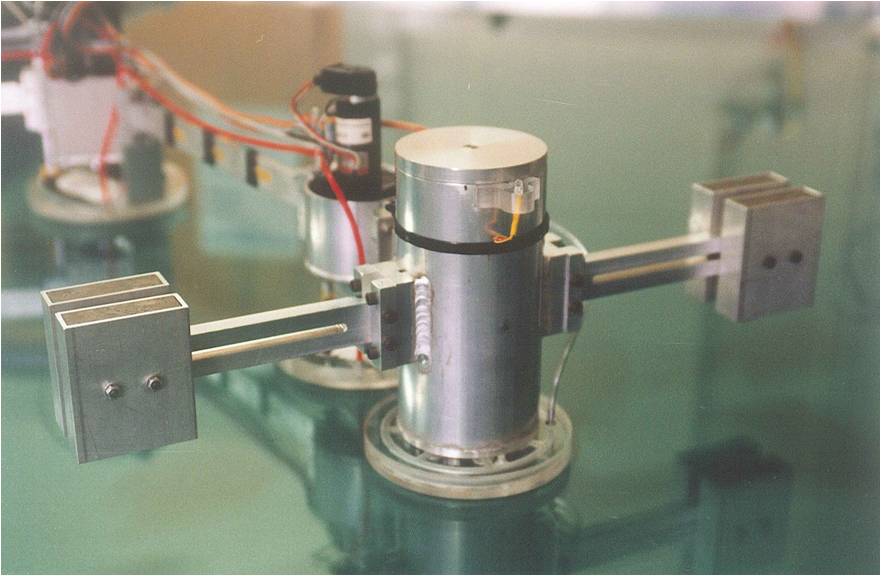
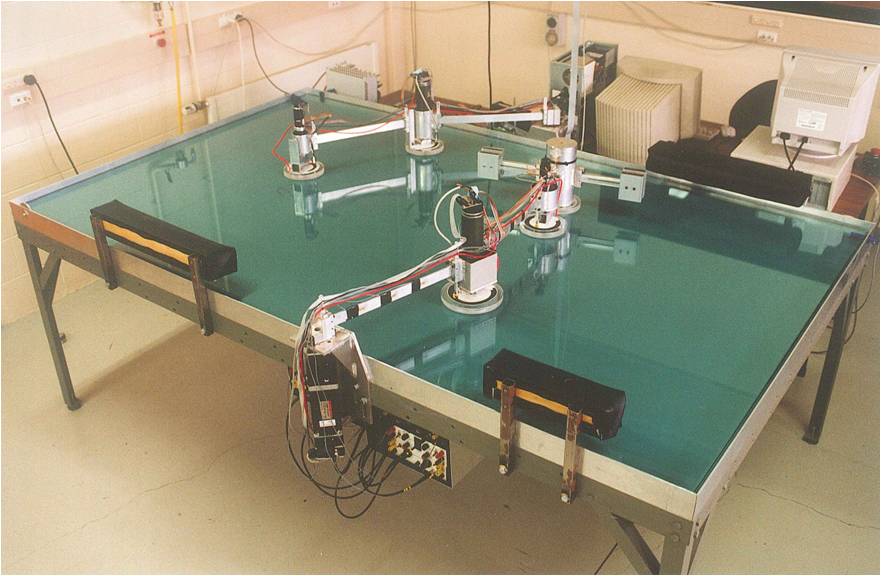
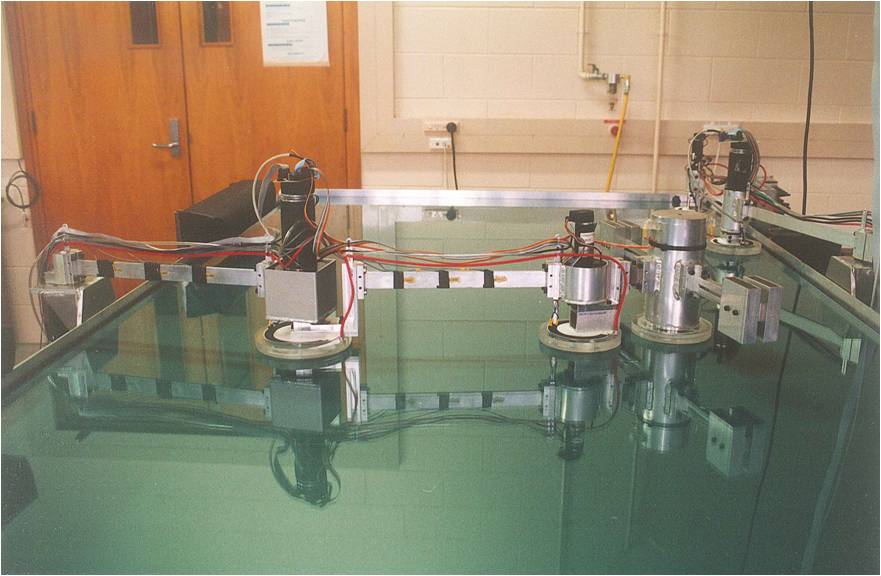
Flexible-link robots / Dynamics and control of robotic systems / Nonlinear and model-based adaptive control / Passivity-based control. Investigations concerned the dynamics and control of multibody systems with particular focus on structurally-flexible robots. A class of nonlinear passivity-based controllers was considered, combining trajectory tracking with active damping of vibrations. Results were extended to model-based adaptive control that allows on-line extraction of parameter information and using it towards improving manipulation performance. Extensive simulation and experimental studies concerned a specially-developed robotics facility.
This work was part of E. Christoforou PhD thesis at the University of Canterbury, Christchurch, New Zealand, under the supervision of Prof. C.J. Damaren, University of Toronto, Institute of Aerospace Studies, Canada, https://www.utias.utoronto.ca/.

Smart camera networks & Machine vision. A probabilistic camera detection model was developed providing the basis for an optimization procedure driving the autonomous reconfiguration of a smart cameras network in real-time in order to improve the overall detection performance. Experimental results using a network of pan-tilt cameras and extensive simulations demonstrated the applicability and performance of the approach. Extensions will include the deployment of the reconfigurable cameras network on autonomous mobile platforms.
Collaborators: Dr. C. Kyrkou, Assist. Prof. S. Timotheou, Assoc. Prof. T. Theocharides, Prof. C. Panayiotou, Prof. M. Polycarpou, Univ. of Cyprus, KIOS Research and Innovation Centre of Excellence, https://www.kios.ucy.ac.cy/.


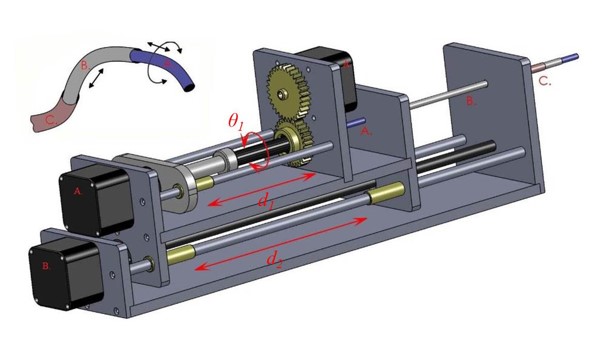
Design and control of continuum robotic mechanisms. Investigations focused on the design of concentric-tube robots, which can be inserted through narrow passages and operate inside confined spaces. Kinematics, motion planning and control aspects were investigated and a prototype system with novel actuation was developed. This technology can be applied in minimally-invasive surgical applications.
Collaborators: Assoc. Prof. P. Shiakolas, Dept. of Mechanical and Aerospace Engineering, Univ. of Texas at Arlington, Texas, https://www.uta.edu/academics/schools-colleges/engineering/academics/departments/mechanical-aerospace.
Aerial Robotics / Kite Robots. A novel flying kite system capable of lifting light payloads (e.g., meteorological instruments) was developed and its dynamics and control were investigated. Basic simulations and experiments were performed to examine a novel method for altitude control, based on active bridle size adjustments for box kites. Continuation of this work will focus on autonomous flight control and environmental/ meteorological applications of robot kites.





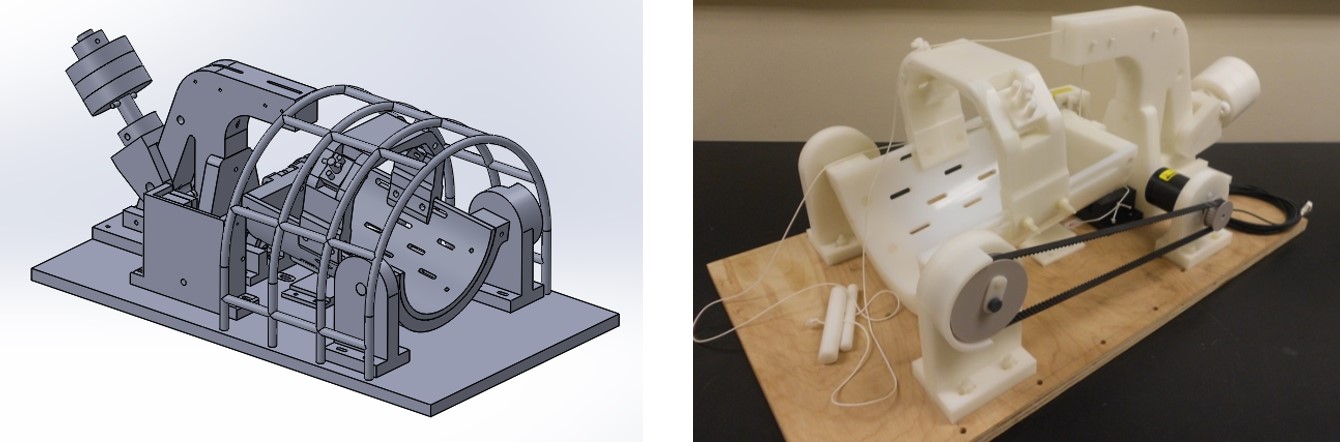
Assistive Devices. The lab currently participates in a project called ‘Ramba’ with a commercial partner (Givotech Ltd - https://givotech.com/) towards the development of a revolutionary robotic platform that allows wheelchair users to automatically ascend and descend stairs without any assistance. The proposal was initiated from a fully functional prototype that was tested and validated before. (The Ramba project SEED/0719/0144 is co-financed by the European Regional Development Fund and the Republic of Cyprus through the Research and Innovation Foundation).
Research in our lab also focuses on the employment of assistive robotics in elderly care towards improving health, quality of life and supporting ageing-in-place (independent living). Investigations also include remote health monitoring and direct connection to cloud-based electronic health records.



Educational Robotics. The lab contributes to Robotex Cyprus, which is an annual competition organized by the Cyprus Computer Society (https://ccs.org.cy/en/). Through the involvement in Robotex Cyprurs, educational and wider methodological aspects of robotic competitions are examined. Robotex Cyprus provides students with the opportunity to participate at a wide range of challenges, which are either themed (e.g., sumo, recycling, folk race), but others focus on a generic task (e.g., line-following, sorting, maze solving). Some challenges from Robotex are shown below: (a) Educational Robotics Pro-jects; (b) Robotics4All; (c) Folkrace; (d) Colour Picking; (e) Line Following; (f) Enhanced Line Following; (g) Maze Solving; (h) Sumo.
Collaborators: Assist. Prof. P. Masouras, Nursing Dept., Cyprus Univ. of Technology, https://www.cut.ac.cy/faculties/hsc/nur/ & Cyprus Computer Society https://ccs.org.cy/.

Other Topics. In-vivo brain biomechanics and traumatic brain injury (TBI) – Design of MRI-compatible devices. Research includes theoretical and experimental studies on the deformation of the human brain during head impacts and uses MRI imaging. Novel MRI-compatible devices were developed (our main contribution to the project) to produce head rotations and head drops for MRI studies on human subjects. The participation was in collaboration with Washington University in St. Louis, Missouri & Center for Neuroscience and Regenerative Medicine – NIH. Project funded by the National Institutes of Health (NIH).
Collaborators: Prof. P.V. Bayly, Washington University in St. Louis, Dept. of Mechanical Engineering and Materials Science (Department Chair), Missouri, https://engineering.wustl.edu/; Dr. Dzung L. Pham and Dr. Andy Knutsen, The Henry M. Jackson Foundation for the Advancement of Military Medicine, Maryland, https://www.hjf.org/.

Industrial robotics and agile manufacturing.
UCY Robotics Lab has been part of the DIH² project (2022), which is funded by Horizon 2020 - the European Union research and innovation programme. The overall purpose is to accelerate production through robotics, improve cost effectiveness of advanced robotics solutions and drive growth in robotics. The power of robotics is exploited to transform the agility of manufacturing in Small and Medium-sized Enterprises (SMEs) across the European Union.
Our Lab is a partner in the COBITT project as a Technology Provider to deal with the robotics aspects of the project. The specific project involves a Technology Transfer Experiment (TTE) in the production line of Capsule Skateboards Ltd, which is a local company, which uses advanced materials and manufacturing methods for the production of skateboards with exceptional properties. Robotic manipulation and mobile robot systems are involved in the technology solution, which was implemented in the factory. New and customized equipment has been developed, introduced and integrated in the factory’s production line.

